5 رباتیک
شاخهها رباتیک به عنوان یک شاخه بینرشتهای از سایر رشتههای علمی شامل مهندسی برق، مکانیک و کامپیوتر، به طراحی، ساخت و بهرهگیری از رباتها میپردازد. از این فناوری به منظور تولید ماشینهایی به عنوان جایگزین نیروی انسانی در کاربردهای گوناگون به ویژه در مواردی که برای انسان خطرناک یا غیر ممکن است (مانند خنثیسازی بمب، سفر در فضای بین سیارات، کارهای صنعتی طاقتفرسا و ...) استفاده میشود. امروزه انواع رباتها با شکل، توانایی و کاربردهای بسیار متنوع ساخته میشود.
با توجه به بین رشتهای بودن علم رباتیک، انجام فعالیتهای علمی در این زمینه نیازمند برخورداری از دانش کافی از سایر رشتههای مرتبط مانند مکانیک، الکترونیک و برنامهنویسی کامپیوتری است. در این فصل پس از معرفی انواع ربات و کاربردهای آن، به طور مختصر به موضوع مکانیک ربات میپردازیم. سایر رشتههای مرتبط در فصلهای دیگر معرفی میگردند.
5.1 مکانیک ربات ها
بخش های مکانیکی یک ربات، مانند اعضای بدن انسان شامل دست و پا می باشند که برای انجام فرمان های صادر شده از مغز انسان به کار می روند. یک ربات بدون وجود بخش مکانیکی، قادر به انجام هیچ کاری نیست. در این بخش، مفاهیم اولیه مکانیک و برخی از اجزای مکانیکی ربات معرفی می گردد.
5.1.1 مفاهیم اولیه مکانیک ربات ها
نیرو: وقتی جسمی را می کشیم یا آن را هل می دهیم، در واقع به آن نیرو وارد می کنیم. اثر نیرو بر یک جسم به شکل های مختلف مانند: شروع به حرکت کردن جسم، توقف جسم، کم یا زیاد شدن سرعت و تغییر شکل جسم خود را نشان می دهد. همچنین نیرو اثر متقابل بین دو جسم است، یعنی اگر شما دوستتان را هل دهید، او نیز شما را هل می دهد و اگر شما وی را بکشید، او نیز شما را می کِشد. به عبارت دیگر در به وجود آمدن نیرو، همواره دو جسم مشارکت دارند که لزوما در تماس با یکدیگر نیستند.
گشتاور: مقدار نیروی وارد بر یک جسم که باعث می شود جسم شروع به چرخش کند، گشتاور نام دارد. برای درک بهتر مفهوم گشتاور، الاکلنگ نشان داده شده در شکل زیر را در نظر بگیرید.
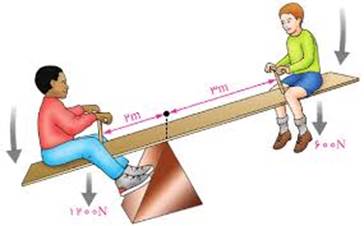
شکل 5-12: مفهوم نیرو و گشتاور.
وقتى پسر بچه ای که وزن بیشتری دارد در طرف راست الاكلنگ می نشيند، وزن او گشتاورى ايجاد می كند كه الاكلنگ را ساعتگرد می چرخاند در حالیکه زمانی که پسر بچه سمت چپ می نشیند وزن او گشتاوری ایجاد می کند که الاکلنگ را پادساعتگرد می چرخاند.
5.1.2 اجزای مکانیکی ربات ها
 بازوی ربات: بازوی ربات
یک دست مکانیکی است که برای انجام یک یا چند وظیفه خاص طراحی شده است. هر بازوی
ربات می تواند متناسب با برنامه ریزی های
انجام شده در مغز ربات، کارهای مختلفی را انجام دهد. به علاوه،
این امکان وجود دارد که یک ربات بتواند بازوهای مختلفی داشته باشد.
بازوی ربات: بازوی ربات
یک دست مکانیکی است که برای انجام یک یا چند وظیفه خاص طراحی شده است. هر بازوی
ربات می تواند متناسب با برنامه ریزی های
انجام شده در مغز ربات، کارهای مختلفی را انجام دهد. به علاوه،
این امکان وجود دارد که یک ربات بتواند بازوهای مختلفی داشته باشد.
شکل 5-13: بازوی ربات.
چرخ دنده: چرخي است با محيط دندانهدار که باعث می شود هنگام درگیری با چرخ دنده های دیگر نلغزد. چرخ دنده معمولا با چرخ دنده های دیگر یا میله ی دندانه دار درگیر می شود. چرخ دنده ها برای انتقال نیرو از محوری به محور دیگر به کار می روند. جهت چرخش دو چرخ دنده مجاور، همواره عکس یکدیگر است. یعنی در صورتي که چرخدنده اول در جهت ساعتگرد بچرخد، چرخدنده دوم در جهت پادساعتگرد خواهد چرخيد و برعکس. اگر زنجیره ای از چرخ دنده ها داشته باشیم، جهات چرخش به ترتیب عوض خواهد شد.
|
|
|
شکل 5-14: چرخ دنده.
برخی از چرخ دنده های پرکاربرد عبارتند از:
 چرخ دنده
ساده: چرخ دنده ساده متداولترين
نوع چرخ دنده است که به دلیل ساخت آسان
و بازده بالا نسبت به چرخ دنده هاي
ديگر، بسيار مورد استفاده قرار مي گيرد.
چرخ دنده ساده در سرعت های
بسیار بالا به کار نمی رود، چون
سروصدای زیادی ایجاد می کند. برای رفع
این مشکل معمولا از چرخ دنده های
مارپیچ استفاده می شود.
چرخ دنده
ساده: چرخ دنده ساده متداولترين
نوع چرخ دنده است که به دلیل ساخت آسان
و بازده بالا نسبت به چرخ دنده هاي
ديگر، بسيار مورد استفاده قرار مي گيرد.
چرخ دنده ساده در سرعت های
بسیار بالا به کار نمی رود، چون
سروصدای زیادی ایجاد می کند. برای رفع
این مشکل معمولا از چرخ دنده های
مارپیچ استفاده می شود.
شکل 5-15: چرخ دنده ساده.
 چرخ دنده
مارپیچ: از اين نوع چرخ دنده ها
در جاهايي که بار زيادي به چرخ دنده وارد مي شود،
استفاده میگردد. این نوع چرخ دنده به
خاطر پيچيدگي شکل، نسبتا گران است.
چرخ دنده
مارپیچ: از اين نوع چرخ دنده ها
در جاهايي که بار زيادي به چرخ دنده وارد مي شود،
استفاده میگردد. این نوع چرخ دنده به
خاطر پيچيدگي شکل، نسبتا گران است.
شکل 5-16: چرخ دنده مارپیچ.
 چرخ دنده
مخروطی: چرخ دنده های
مخروطی برای تغییر جهت مناسبند. برای مثال در شکل روبرو محورهای چرخ دنده ها
زاویه ای 90 درجه باهم می سازند.
دندانه این چرخ دنده ها
می توانند ساده یا مارپیچ باشند. بازده
چرخ دنده های
مخروطی تقریبا 80 درصد است.
چرخ دنده
مخروطی: چرخ دنده های
مخروطی برای تغییر جهت مناسبند. برای مثال در شکل روبرو محورهای چرخ دنده ها
زاویه ای 90 درجه باهم می سازند.
دندانه این چرخ دنده ها
می توانند ساده یا مارپیچ باشند. بازده
چرخ دنده های
مخروطی تقریبا 80 درصد است.
شکل 5-17: چرخ دنده مخروطی.
 رک و پینیون: اين نوع چرخدندهها
براي تبديل حرکت چرخشي به حرکت رفت و برگشتي استفاده می شوند
و داراي بازده تقريبي 90% می باشند.
رک و پینیون: اين نوع چرخدندهها
براي تبديل حرکت چرخشي به حرکت رفت و برگشتي استفاده می شوند
و داراي بازده تقريبي 90% می باشند.
شکل 5-18: رک و پینتون.
 چرخ دنده
حلزونی: از جمله مزيت هاي
اين نوع چرخدنده، يکسو کردن جهت انتقال نيرو است. بدین معنا که قدرت در یک جهت،
جهت چرخش، منتقل می شود و اگر معکوس گردد، قدرت
منتقل نخواهد شد.
چرخ دنده
حلزونی: از جمله مزيت هاي
اين نوع چرخدنده، يکسو کردن جهت انتقال نيرو است. بدین معنا که قدرت در یک جهت،
جهت چرخش، منتقل می شود و اگر معکوس گردد، قدرت
منتقل نخواهد شد.
شکل 5-19: چرخ دنده حلزونی.
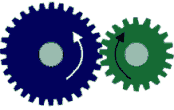
نسبت تبدیل در چرخ دنده ها: نسبت تبدیل دو چرخدنده برابر است با محيط چرخدنده اول به محيط چرخدنده دوم و يا شعاع چرخدنده اول به شعاع چرخدنده دوم. نسبت تبدیل دو چرخ دنده را می توان به صورت نسبت دندانه های چرخ دنده اول به چرخ دنده دوم نیز در نظر گرفت. برای مثال فرض کنید که در زیر شعاع چرخدنده اول 20 سانتی متر و شعاع چرخدنده دوم 5 سانتی متر باشد. به این ترتیب، نسبت تبدیل چرخدنده اول به چرخدنده دوم برابر 4 خواهد بود. یعنی هربار که چرخ دنده بزرگتر یک دور می زند، چرخ دنده کوچکتر چهار بار حول محور خود می چرخد.
شکل 5-20: نسبت چرخ دنده ها.
معمولا چرخ دنده ای که نیروی اولیه به آن وارد می گردد را چرخ دنده اولیه و چرخ دنده ای که نیروی خروجی جدید از آن به دست می آید را چرخ دنده ثانویه می گویند. با کوچک شدن چرخ دنده ثانویه سرعت زیاد و قدرت کاهش می یابد و با بزرگتر شدن چرخ دنده ثانویه نسبت به چرخ دنده اولیه، قدرت افزایش یافته و سرعت کاهش می یابد. اگر دو چرخ دنده دارای قطر یکسان باشند در این صورت سرعت و قدرت یکسان باقی می ماند و تنها جهت چرخش تغییر می یابد.
آنچه باعث می شود خودروی مسابقه توانایی به دست آوردن سرعت های بالا را داشته باشد اما توان کشیدن بار سنگین را نداشته باشد، یا برعکس آن، کامیون توان کشش بارهای سنگین را دارا بوده اما توانایی رسیدن به سرعت های بالا را نداشته باشد، به دلیل همان اصل نسبت چرخ دنده ها است.
جعبه دنده: برای انتقال قدرت، معمولا ترکیبی از چند چرخ دنده بکار می رود، که به آن جعبه دنده می گویند. چرخ دنده خورشیدی و زنجیر یکی از رایجترین و مناسبترین روش ها برای انتقال قدرت میباشد.
از کاربردهای بسیار رایج این سیستم انتقال قدرت میتوان به دوچرخه ها اشاره نمود. در دوچرخه قدرت پدال توسط دو عدد چرخ دنده خورشیدی و یک عدد زنجیر به چرخ منتقل میشود و باعث حرکت دوچرخه میشود.

شکل 5-21: جعبه دنده.