5.2 انواع ربات
کلمه ربات توسط Karel Capek نویسنده نمایشنامه R.U.R (رباتهای جهانی روسیه) در سال 1920 ابداع شد. ریشه این کلمه، کلمه چک اسلواکی (Robotnic) به معنی کارگر میباشد. در این نمایشنامه، نمونه ماشین، از بیشترین قدرت بعد از انسان، بدون دارا بودن نقاط ضعف معمولی او، برخوردار بود. در پایان نمایش، این ماشین برای مبارزه علیه سازندگان خود استفاده شد. البته پیش از آن یونانیان مجسمه متحرکی ساخته بودند که نمونه اولیه چیزی بوده که ما امروزه آن را ربات مینامیم. امروزه معمولا کلمه ربات به معنی هر ماشین ساخت بشر است که بتواند کاری که به طور طبیعی توسط انسان انجام میشود را انجام دهد.
5.2.1 ربات انسان نما
در میان انواع ربات ها، ربات هایی که بتوانند حرکت انسان ها را تقلید کنند، بسیار مورد توجه دانشمندان قرار گرفته اند.
آسیمو رباتی از نوع ربات های انسان نما یا Humanoid Robots می باشد که توسط کمپانی هوندا ساخته شده است. این ربات با 120 سانتی متر قد و 54 کیلوگرم وزن، شبیه فضانوردی است که یک کوله پشتی بر دوش خود دارد. این ربات توانایی راه رفتن و دویدن تا سرعت 6 کیلومتر بر ساعت بر روی دو پای خود را دارد. اولین مدل از این ربات در سال 1986 و تحت عنوان E0 ساخته شد. نام ASIMO مخفف عبارتAdvanced Step in Innovative Mobility می باشد. تا فوریه سال 2009 در مجموع 100 عدد از این ربات ساخته شد که هر کدام قیمتی کمتر از یک میلیون دلار داشت. برخی از آن ها نیز سالی 166 هزار یورو اجاره داده می شد.
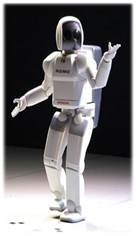 هوندا در آسیمو مدل 2000 خصیصه های
زیادی را گنجاند تا بتواند تعامل بهتری با انسان داشته باشد. این خصیصه ها در
5 گروه زیر طبقه بندی می شوند:
هوندا در آسیمو مدل 2000 خصیصه های
زیادی را گنجاند تا بتواند تعامل بهتری با انسان داشته باشد. این خصیصه ها در
5 گروه زیر طبقه بندی می شوند:
شکل 5-1: ربات انسان نمای آسیمو.
شناسائی اشیا متحرک
آسیمو با استفاده از اطلاعات بصری دریافت شده توسط دوربینی که در سر ربات جایگذاری شده است، می تواند حرکات چندین شیء، فاصله و جهت را تشخیص دهد. از جمله کاربردهای مشترک این خصیصه می توان دنبال کردن حرکت مردم به منظور رفتن به دنبال یک شخص و یا دست دادن با شخص را نام برد.
شناسائی حرکات معنی دار و اشارات اعضای بدن
آسیمو همچنین با توانایی تفسیر وضعیت و حرکت یک دست می تواند معنای حرکات و اشارات معنادار دست را تشخیص دهد. از این رو آسیمو می تواند نه فقط با فرامین صوتی بلکه با حرکات معنادار و اشارات معمول انسان راهنمایی و هدایت شود. بدین ترتیب آسیمو قادر خواهد بود که برای مثال به تقاضای دست دادن شخص یا دست و سر تکان دادن اشخاص به طور مناسب پاسخ دهد. آسیمو همچنین می تواند جهت حرکات اعضای بدن را مثل اشاره کردن به یک جسم را تشخیص دهد.
شناسائی محیط
آسیمو همچنین می تواند اشیا و محیط اطراف خود را تشخیص داده و نسبت به آن عکس العمل نشان دهد. برای مثال می تواند خطرات بالقوه پلکان را تشخیص دهد و انسان یا دیگر اشیا متحرک را متوقف کرده و یا از برخورد بدنی انسان جلوگیری به عمل آورد.
تمایزدادن بین اصوات
قابلیت تمایز صداهای مختلف در آسیمو بهبود یافته است. آسیمو می تواند مکالمات و دیگر صداها را از یکدیگر تشخیص دهد. هنگامی که با وی صحبت می شود، می تواند صدا را تشخیص داده و رو به شخص سخنگو کرده و به او همراه با نام فرد مذکور پاسخ دهد. آسیمو همچنین می تواند صداهای ناگهانی و غیرمعمول همچون افتادن یک شیء یا یک تصادف را تشخیص داده و روی خود را به جهت صدا برگرداند.
5.2.2 ربات های نظامی
 در
سال های اخیر استفاده از ربات ها در
فعالیت های نظامی به عنوان جایگزینی برای انسان ها،
به دلیل بی تاثیر بودن سرما، گرما، بیماری، استرس،
و ... بر نحوه عملکرد آن ها، نیاز نداشتن فرایندهای های
پیچیده و زمان بر آموزش و ...، بسیار فراگیر شده است.
از کاربردهای ربات های نظامی می توان
به شناسایی، پاکسازی میادین مین، نمونه برداری
از آلودگی ها و ... اشاره کرد.
در
سال های اخیر استفاده از ربات ها در
فعالیت های نظامی به عنوان جایگزینی برای انسان ها،
به دلیل بی تاثیر بودن سرما، گرما، بیماری، استرس،
و ... بر نحوه عملکرد آن ها، نیاز نداشتن فرایندهای های
پیچیده و زمان بر آموزش و ...، بسیار فراگیر شده است.
از کاربردهای ربات های نظامی می توان
به شناسایی، پاکسازی میادین مین، نمونه برداری
از آلودگی ها و ... اشاره کرد.
 ربات های
کروی انواعی از ربات ها هستند که در صنایع نظامی به
کار گرفته می شوند. این ربات ها از
دو نمیکره تشکیل شده اند که توسط حلقه ای به
یکدیگر وصل شده اند و واحد تحریک داخلی کره از حلقه
آویزان شده است. بدین صورت که مقداری مواد منفجره درون آن ها
قرار داده و سپس با کنترل از راه دور به سمت اهداف نظامی مورد نظر فرستاده می شوند.
ربات های
کروی انواعی از ربات ها هستند که در صنایع نظامی به
کار گرفته می شوند. این ربات ها از
دو نمیکره تشکیل شده اند که توسط حلقه ای به
یکدیگر وصل شده اند و واحد تحریک داخلی کره از حلقه
آویزان شده است. بدین صورت که مقداری مواد منفجره درون آن ها
قرار داده و سپس با کنترل از راه دور به سمت اهداف نظامی مورد نظر فرستاده می شوند.
شکل 5-2:نمونه ای از ربات های نظامی.
5.2.3 ربات های جنگجو
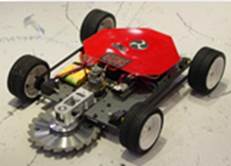 این
گروه از ربات ها بیشتر در مسابقات استفاده می شوند.
در مسابقات ربات های جنگجو، دو یا چند ربات در محیطی
بسته قرار می گیرند و هر کدام با تجهیزات مکانیکی
خاص خود مثل چکش، اره و ... مشغول تخریب سایر ربات ها می شود.
در نهایت رباتی که بتواند سایر ربات ها را از بین
ببرد، به عنوان بهترین ربات شناخته می شود. مسابقات
این ربات ها بسیار جذابند و تماشاگران زیادی را به خود جلب می کنند.
این
گروه از ربات ها بیشتر در مسابقات استفاده می شوند.
در مسابقات ربات های جنگجو، دو یا چند ربات در محیطی
بسته قرار می گیرند و هر کدام با تجهیزات مکانیکی
خاص خود مثل چکش، اره و ... مشغول تخریب سایر ربات ها می شود.
در نهایت رباتی که بتواند سایر ربات ها را از بین
ببرد، به عنوان بهترین ربات شناخته می شود. مسابقات
این ربات ها بسیار جذابند و تماشاگران زیادی را به خود جلب می کنند.
شکل 5-3: نمونه ای از یک ربات جنگجو.
5.2.4 ربات های صنعتی
ربات های صنعتی امروزه بخش جدا نشدنی از خط تولید کارخانه ها هستند و کار را برای کارخانه داران راحت تر و سودمندتر می کنند. ربات های صنعتی شامل قطعات الکترونیکی و مکانیکی هستند که در ابتدا به صورت بازوهای مکانیکی برای جابجایی قطعات و یا کارهای ساده و تکراری که موجب خستگی و عدم تمرکز کارگر و افت بازده می شوند، بوجود آمدند. این ربات ها معمولا در نقطه ای ثابت و در فضای کاملا کنترل شده در کارخانه نصب می شوند و به غیر از وظیفه ای که به خاطر آن طراحی شده اند قادر به انجام کار دیگری نیستند. این وظیفه می تواند در حد بسته بندی تولیدات، کنترل کیفیت و جدا کردن تولیدات بی کیفیت و یا کارهای پیچیده تری همچون جوشکاری و رنگ زنی با دقت بالا باشد. نوع دیگری از ربات های صنعتی که امروزه مورد توجه بیشتری قرار گرفته است، ربات های متحرک هستند که همانند موجودات زنده در دنیای واقعی و با شرایط واقعی زندگی می کنند و سیر اتفاقاتی که ربات با آن ها روبرو می شود از قبل مشخص نیست.

شکل 5-4: ربات های صنعتی.
5.2.5 ربات های فضانورد
 به
طور كلي یکی از هدف های
اصلي و مشترك همه ماموريتهايي كه به سطح سیارات دیگر انجام ميشود اين است كه
بتوان امكان وجود شرايط لازم براي زندگي انسانها در اين سياره ها را بررسي كرد. اما
به دلیل شرایط جوی نامطلوب و مدت زمان مسافرت طولانی، امکان فرستادن انسان به چنین
ماموریت هایی
وجود ندارد. برای این منظور، محققان از ربات های فضانورد کمک می گیرند. بررسي و
مطالعه وضعيت آب و هوا در سیارات، بررسي امكان ميزباني آن ها از انسانها،
انجام مطالعات زمينشناختي و همچنين دستيابي به اطلاعاتي براي برنامهريزي يك
ماموريت سرنشيندار به سیاراتی مانند مریخ از اهدافی است که توسط ربات ها عملی می گردند. به عنوان
نمونه، اين ربات ها
می توانند با
بررسی تركيبات مواد تشكيلدهنده سطح سیاره، اطلاعات با ارزشی را در اختیار
پژوهشگران قرار دهند. از جمله این ربات ها می توان
به ربات مریخ نورد
اشاره کرد. اين ربات مجهز به يك تفنگ نمونهبرداري ليزري است و ميكروسكوپهاي
پيشرفتهاي با قابليت فيلمبرداري
HD روي اين ربات نصب شده است كه در طيفهاي نوري مختلف
قابل استفاده است. علاوه بر اين داخل اين ربات امكانات ديگري نيز نهفته است، به
گونه ای که ميتوان
از اين ربات به عنوان يك آزمايشگاه پيشرفته نام برد.
به
طور كلي یکی از هدف های
اصلي و مشترك همه ماموريتهايي كه به سطح سیارات دیگر انجام ميشود اين است كه
بتوان امكان وجود شرايط لازم براي زندگي انسانها در اين سياره ها را بررسي كرد. اما
به دلیل شرایط جوی نامطلوب و مدت زمان مسافرت طولانی، امکان فرستادن انسان به چنین
ماموریت هایی
وجود ندارد. برای این منظور، محققان از ربات های فضانورد کمک می گیرند. بررسي و
مطالعه وضعيت آب و هوا در سیارات، بررسي امكان ميزباني آن ها از انسانها،
انجام مطالعات زمينشناختي و همچنين دستيابي به اطلاعاتي براي برنامهريزي يك
ماموريت سرنشيندار به سیاراتی مانند مریخ از اهدافی است که توسط ربات ها عملی می گردند. به عنوان
نمونه، اين ربات ها
می توانند با
بررسی تركيبات مواد تشكيلدهنده سطح سیاره، اطلاعات با ارزشی را در اختیار
پژوهشگران قرار دهند. از جمله این ربات ها می توان
به ربات مریخ نورد
اشاره کرد. اين ربات مجهز به يك تفنگ نمونهبرداري ليزري است و ميكروسكوپهاي
پيشرفتهاي با قابليت فيلمبرداري
HD روي اين ربات نصب شده است كه در طيفهاي نوري مختلف
قابل استفاده است. علاوه بر اين داخل اين ربات امكانات ديگري نيز نهفته است، به
گونه ای که ميتوان
از اين ربات به عنوان يك آزمايشگاه پيشرفته نام برد.
شکل 5-5: نمونه ای از یک ربات فضانورد.
5.2.6 ربات های پرنده
 کلیه
ربات هایی که قابلیت پرواز داشته باشند را ربات های
پرنده می نامند. این ربات ها با
داشتن ابعاد کوچک، عدم نیاز به باند پرواز و فرود، قدرت مانور بالا و ... امکانات
و کاربردهای فراوانی را در اختیار کاربران قرار داده اند.
از این ربات ها می توان
به منظور تهیه نقشه های زمین شناسی،
عکس برداری هوایی، حمل قطعات و ابزار آلات و ...
استفاده کرد.
کلیه
ربات هایی که قابلیت پرواز داشته باشند را ربات های
پرنده می نامند. این ربات ها با
داشتن ابعاد کوچک، عدم نیاز به باند پرواز و فرود، قدرت مانور بالا و ... امکانات
و کاربردهای فراوانی را در اختیار کاربران قرار داده اند.
از این ربات ها می توان
به منظور تهیه نقشه های زمین شناسی،
عکس برداری هوایی، حمل قطعات و ابزار آلات و ...
استفاده کرد.
شکل 5-6: نمونه ای از یک ربات پرنده.
5.2.7 ربات های امدادگر
 هدف
اصلی از ساخت ربات های امدادگر، طراحی و ساخت ربات هایی
است که بتوانند در زمان وقوع حوادث غیرمترقبه و بلایای طبیعی به کمک انسان ها
شتافته و در عملیات های مختلفی مانند مهار آتش سوزی،
جستجو ونجات مصدومان از زیر آوار، انتقال مصدومان به بیمارستان، حضور در محیط های
آلوده به مواد شیمیایی خطرناک یا تشعشعات رادیواکتیو و ارسال صدا، تصویر و یا
نمونه برداری به تیم های
امداد و نجات کمک کنند.
هدف
اصلی از ساخت ربات های امدادگر، طراحی و ساخت ربات هایی
است که بتوانند در زمان وقوع حوادث غیرمترقبه و بلایای طبیعی به کمک انسان ها
شتافته و در عملیات های مختلفی مانند مهار آتش سوزی،
جستجو ونجات مصدومان از زیر آوار، انتقال مصدومان به بیمارستان، حضور در محیط های
آلوده به مواد شیمیایی خطرناک یا تشعشعات رادیواکتیو و ارسال صدا، تصویر و یا
نمونه برداری به تیم های
امداد و نجات کمک کنند.
شکل 5-7: ربات امدادگر.
5.2.8 ربات های مسیریاب
 ربات های
مسیریاب از ساده ترین نوع ربات های
رایج هستند. ماموریت این ربات ها این است که
خطوط مشخص شده را تشخیص داده و آن ها را دنبال
کنند. از جمله کاربردهای این ربات می توان به حمل و
نقل و جابجایی وسایل و کالاهای مختلف در کارخانجات، بیمارستان ها،
فروشگاه ها، کتابخانه ها و
... اشاره نمود.
ربات های
مسیریاب از ساده ترین نوع ربات های
رایج هستند. ماموریت این ربات ها این است که
خطوط مشخص شده را تشخیص داده و آن ها را دنبال
کنند. از جمله کاربردهای این ربات می توان به حمل و
نقل و جابجایی وسایل و کالاهای مختلف در کارخانجات، بیمارستان ها،
فروشگاه ها، کتابخانه ها و
... اشاره نمود.
شکل 5-8: ربات تعقیب خط.
5.2.9 ربات های اجتماعی
 ربات های
اجتماعی، سیستم هایی چند رباته هستند که متشکل از
تعداد زیادی ربات با ساختار فیزیکی ساده می باشند.
در این سیستم ها یک رفتار اجتماعی دلخواه توسط
ارتباط بین ربات ها یا ارتباط ربات ها با
محیط انجام می شود.
ربات های
اجتماعی، سیستم هایی چند رباته هستند که متشکل از
تعداد زیادی ربات با ساختار فیزیکی ساده می باشند.
در این سیستم ها یک رفتار اجتماعی دلخواه توسط
ارتباط بین ربات ها یا ارتباط ربات ها با
محیط انجام می شود.
شکل 5-9: مجموعه ای از ربات های اجتماعی.
5.2.10ربات های جراح و کمک جراح
می توان از ربات ها در جراحی های قلب، مغز، ستون فقرات، نخاع، گلو و جراحی های زانو استفاده کرد. ربات های جراح با دقت بالا و تکرارپذیری خود، سطح کیفی ثابتی را در عمل های جراحی دنبال می کنند.